mirror of
https://github.com/iNavFlight/inav.git
synced 2025-07-12 19:10:27 +03:00
1.4 KiB
1.4 KiB
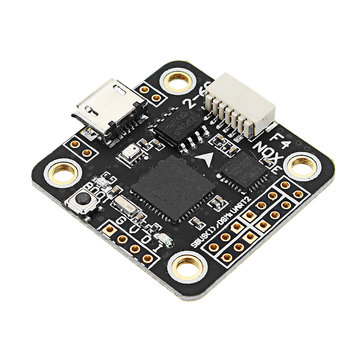
Board - NOX
![Airbot]https://youtu.be/j3zIYFYZ_SQ
 ![Banggood]
![Banggood]c14a1e86-4e58-4bc8-85de-8e344cb382b9.jpg)
![Banggood]45a68ade-9be1-4fff-afec-bbdd45f0331d.jpg)
Airbot Specification:
-
Betaflight OSD
-
STM32F411 MCU
-
MPU6000 Gyro - It's also replaceable
-
Barometer
-
5V BEC with LC filter (500ma)
-
4000uf capacitors onboard - No Need for bulky caps
-
4in1 ESC
-
BLHeli32 - The 32-bit architecture that we've come to expect
-
DSHOT 1200
-
35A Per motor
-
Telemetry Output functionality
-
ESC upgradeable
Banggood Specification:
- Model: F4 Nox4
- Version: Acro Version / Deluxe Version
- Acro Version: Without Barometer and Blackbox
- Deluxe Version: With Barometer and Blackbox
- CPU: STM32F411C
- MPU: MPU6000
- Input Voltage: Support 2-4S Lipo Input
- Built-In Betaflight OSD
- Built-in 5V @ 3A BEC
- 3.3V
- Built-in LC Filter
- DShot, Proshot ESC
- Support Spektrum 1024 /2048 , SBUS, IBUS, PPM
- Size: 27x27mm
- Mounting Hole: 20x20mm , M2.5
- Weight: 3.3g
- DSM / IBUS/SBUS Receiver, choose UART RX2
- PPM Receiver, don't need choose UART Port