mirror of
https://github.com/iNavFlight/inav.git
synced 2025-07-14 03:49:58 +03:00
26 lines
890 B
Markdown
26 lines
890 B
Markdown
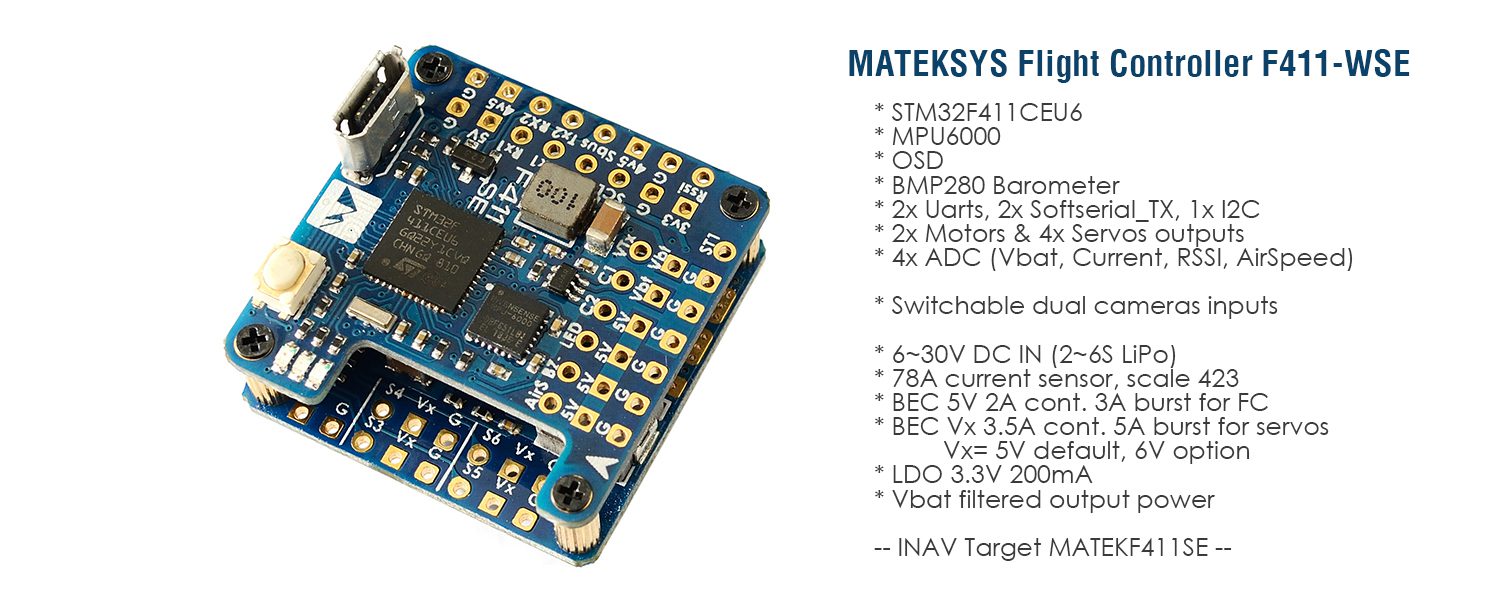
# Board - [MATEKSYS F411-WSE](http://www.mateksys.com/?portfolio=f411-wse)
|
|
|
|
|
|
|
|
## Specification:
|
|
|
|
* STM32F411 CPU
|
|
* OSD
|
|
* BMP280 barometer (DSP310 with new FCs from around June 2021)
|
|
* Integrated PDB for 2 motors
|
|
* 2 UART ports
|
|
* 6 servos
|
|
* no SD card slot
|
|
* 3 BECs
|
|
|
|
## Details
|
|
|
|
* [Full specification](http://www.mateksys.com/?portfolio=f411-wse)
|
|
* SBUS pad has a built-in inverter and is connected to UART2 RX
|
|
|
|
## Available TARGETS
|
|
|
|
* `MATEKF411SE` Stock target. LED control and have SS1 on ST1 pad, SS2 on TX2 pad.
|
|
* `MATEKF411SE_PINIO` Adds USER 2 PINIO support on the LED pad.
|
|
* `MATEKF411SE_FD_SFTSRL1` Adds full duplex SS1 by putting the RX on the LED pad.
|
|
* `MATEKF411SE_SS2_CH6` SS2 moved to Ch6 pad. This keeps UART 2 as a full UART (for example, for use with Crossfire) and SS2 support.
|