4.5 KiB
Board - MATEKSYS F405 family
Matek F405-CTR
Matek F405-STD
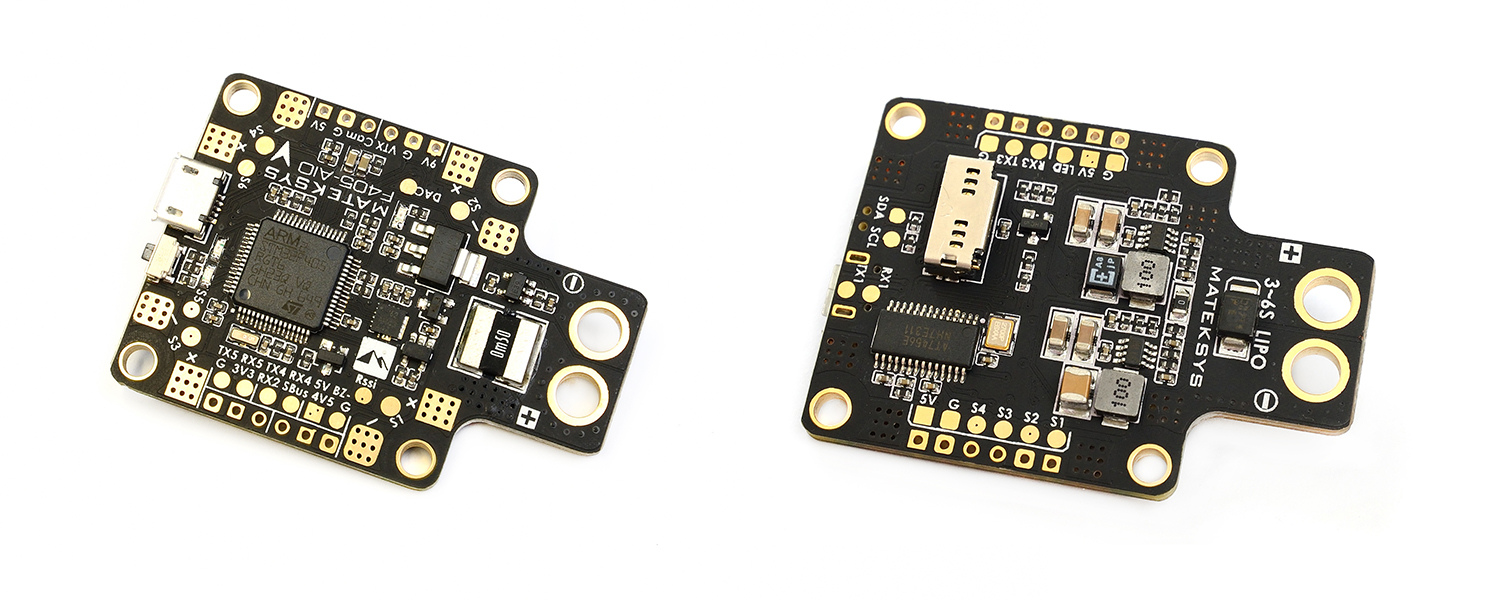
Matek F405-AIO (end-of-life)
Matek F405-OSD (end-of-life)
Firmware
Due to differences on the board (I2C - see below), there are two firmware variants:
| Board | Firmware |
|---|---|
| Matek F405-AIO, STD, CTR | inav_x.y.z_MATEKF405.hex inav_x.y.z_MATEKF405_SERVOS6.hex |
| Matek F405-OSD | inav_x.y.z_MATEKF405OSD.hex |
Hardware features
- MCU: STM32F405RGT6, 168MHz
- IMU: ICM-20602 (OSD, AIO, STD), MPU6000 (CTR)
- OSD: BetaFlight OSD w/ AT7456E chip
- Baro: BMP280 (STD, CTR)
- Compass: No
- Blackbox: MicroSD card slot
- VCP, UART1, UART2, UART3, UART4, UART5
- Built in inverter for SBUS input (UART2-RX)
- PPM/UART Shared: UART2-RX
- Battery Voltage Sensor
- I2C SDA & SCL: Yes
- LDO: 3.3V Max. 300mA
- Current Sensor: Yes (AIO, CTR), otherwise FCHUB-6S option
- Integrated Power Distribution Board: Yes (AIO, CTR), otherwise FCHUB-6S option
- Integrated Voltage Regulator: 5V 2A & 9V 2A (AIO), 5V 2A (CTR), otherwise FCHUB-6S option
- 6 PWM / DSHOT capable outputs
- WS2812 Led Strip : Yes
- Beeper: Yes
- RSSI: Yes
- Side-press button for BOOT(DFU) mode
- Anti-vibration Standoffs
I2C
The F405-AIO, STD, CTR boards expose dedicated I2C pads. The F405-OSD does not expose I2C. For INAV there is a software I2C provision using the USART3 pads, as:
- SDA => RX3, SCL => TX3
- Do not assign any serial function to USART3
PWM and Servos
Due to the available hardware, please note:
Flying Wing
- S1 : ESC
- S2 : LEFT elevon
- S3 : RIGHT elevon
Tricopter
- S1 : Tail Servo
- S2 : Motor 1
- S3 : Motor 2
- S4 : Motor 3
If you need servo connected to S6 pin while keeping motors on S1..S4 pins (e.g. camera tilt on quadcopter), please flash MATEKF405_SERVOS6 firmware.
I2C requires that the WS2812 led strip is moved to S5, thus WS2812 is not usable on hexcopter and similar.
Soft Serial
Soft serial is available as an alternative to a hardware UART on RX4/TX4 and TX2. By default this is NOT inverted. In order to use this feature:
- Enable soft serial
- Do not assign any function to hardware UART4
- Assign the desired function to the soft-serial ports
- UART4 TX/RX pads will be used as SoftSerial 1 TX/RX pads
- UART2 TX pad will be used as SoftSerial 2 TX pad
RX2 and SBUS pads can be used as normal for receiver-only UART. If you need a full duplex UART (IE: TBS Crossfire) and SoftSerial, then use UART 1, 3 or 5 for Full Duplex.
Common scenarios for SoftSerial on this boards:
You need to wire a FrSky receiver (SBUS and SmartPort) to the Flight controller
- Connect SBUS from Receiver to SBUS pin on the Flight Controller
- Connect SmartPort from Receiver to TX2 pad on the Flight Controller
- Enable SoftSerial and set UART2 for Serial RX and SoftSerial 2 for SmartPort Telemetry
You need to wire a SmartAudio or Trump VTX to the Flight controller
- Connect SmartAudio/Tramp from VTX to the TX4 pad on the Flight Controller
- Enable SoftSerial and set SoftSerial 1 for SmartAudio or Tramp
USB
This board uses STM32 VCP and does not use a UART when USB is connected. STM32 VCP drivers might be required on some operating systems.
Flashing requires DFU mode and STM32 DFU drivers. On Linux, the configurator or dfu-util work with a udev rule.
# DFU (Internal bootloader for STM32 MCUs)
SUBSYSTEM=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="df11", MODE="0664", GROUP="plugdev"
ATTRS{idVendor}=="0483", ATTRS{idProduct}=="5740", ENV{ID_MM_DEVICE_IGNORE}="1"
On Windows, it may be necessary to use the Zadig tool to install the WinUSB driver.
Manufacturer
Matek Systems: http://www.mateksys.com/
Distributors
FAQ & Known Issues
Rcgroups Thread Matek F405: https://www.rcgroups.com/forums/showthread.php?2889298-MATEKSYS-Flight-Controller-F405-OSD-32K-Gyro-5xUARTs-SD-Slot
Rcgroups Thread Matek F405-AIO: https://www.rcgroups.com/forums/showthread.php?2912273-Matek-Flight-Controller-F405-AIO
This board doesn't have hardware inverters for UART pins. This page explains getting SmartPort telemetry working on F4 board: https://github.com/iNavFlight/inav/blob/master/docs/Telemetry.md